Q2. 高精地圖的組成由哪些?
根據文獻指出,高精地圖可分為五層,分別為基本地圖(base map)、幾何地圖(geometric map)、語意地圖(semantic map)、
地圖先驗資訊(map priors)、即時地圖資訊(real-time knowledge),如下圖所示。
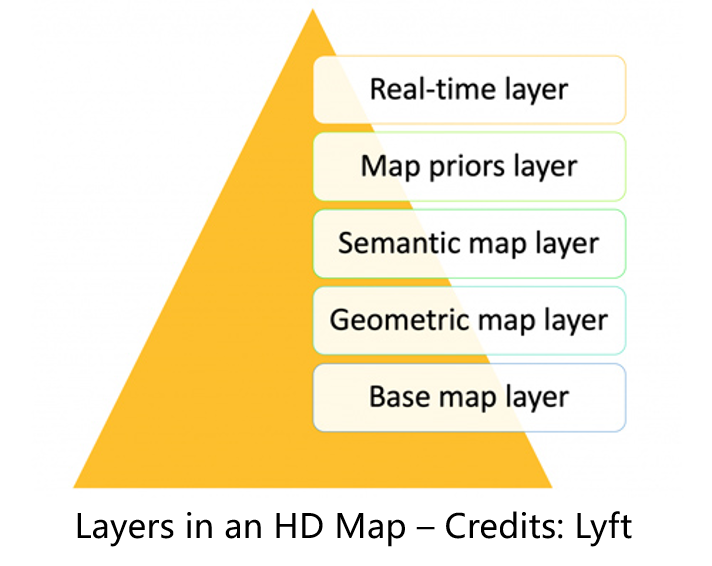
- 基本地圖即標準的高精地圖。
- 幾何地圖是由光達、相機、GNSS、IMU感測器收集的原始資料所組成,其輸出結果為三維密點雲以及經由資料後處理產生符合高精地圖所需之物件,這些資料皆會儲存於幾何地圖中。
- 語意地圖則建立在幾何地圖之上,此地圖可以是二維或三維的資訊,如車道邊界線、交叉口、停車區、禁止標誌、紅綠燈等輔助安全行駛的資訊,這些物件皆包含豐富的屬性資訊,如速限、變換車道等。
- 地圖先驗資訊則包含動態資訊與人類行為的資料,例如:紅綠燈的變換順序,停車位週轉率、於停車場時車輛的平均車速等,一般會將這些先驗資訊結合即時資訊來使用。
- 即時地圖資訊為高精地圖中的最頂層,包含即時動態交通更新資訊,這些資料也能被共享於自駕車隊中。